The Air Computer
Can you build a computer with water, air and clever geometry?

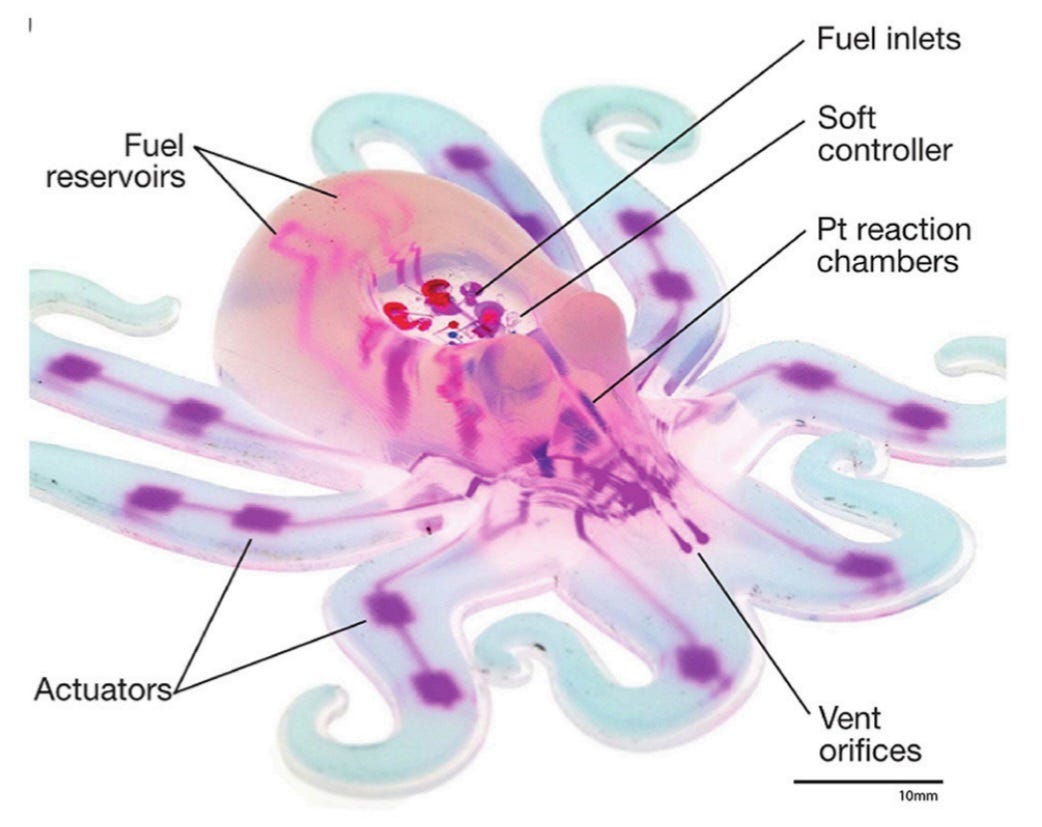
Ten years ago a creature twitched its tentacles in the Wyss Institute, Harvard University. It looked like an octopus, but looks can be deceiving. It wasn't a robot either, and held not a gram of metal nor spark of electricity, yet it moved under its own steam. Literally!

The Harvard octopus wasn't alive and had a brain that flowed with vapour, not electrons. It had no cables, no motors, no batteries and no clever little CPU. It was a thing of squishy limbs and chemical power alone, and that was enough.
Because the creature's brain was pneumatic!
Octobot was a pretty simple affair and could only power itself for eight minutes at a time through a hydrogen peroxide reservoir and a platinum catalyst, but it was enough to prove the idea that logic doesn't need to be slaved to silicon.
The ersatz synapses firing in that mockery of life weren't organic and they weren't electrical either, but an expression of simple physics.
…Not so different from us, then. We are also an expression of physics, but ten billion times more complex, and not pneumatic or hydraulic.
This is fluidic logic. You can make computers this way.
And weird robot octopi are only one application of fluidic logic. It goes far, far further than that, and gets weird.
Want to find out about it?
1: Stop The Plane!
Beneath our world of silicon sorcery lives a much older one, hidden from view but still alive in those places where air hisses and steam takes orders from mortal men.
After all, we controlled very complex machinery long before the invention of the electronic computer. We used mechanisms, hydraulics and compressed air. In many places we still do.
Electronic computers are undoubtedly powerful; fast, flexible, precise, able to calculate a million things at once and be reprogrammed at will. But we didn't always need them, and this begs a few questions:
Can you make a computer that runs on fluids & mechanisms instead of air? Is there any reason I'd do that?
And can I make a Commodore 64 that computes with pneumatics, and then play Elite on it?
All good questions, but a lot of it starts with how can I do basic logic processing with just air!? Fortunately, that's a question with a lot of very good answers, to which we need to look no further than a transistor.
The transistor is the workhorse of modern micro-electronics. Billions of them are etched into every silicon chip in an act of precision miniaturisation that flirts with actual magic. But for all that mystical techno-sorcery, the actual function of a transistor is simplicity itself.
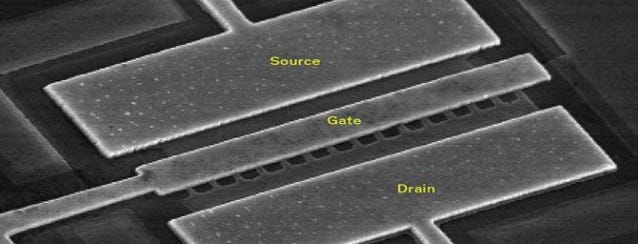
A transistor is part switch, part amplifier. A small current enters, which opens a ‘gate’ for a much larger current to pass through the component. That's it. Multiply by billions and shrink to the nanometer scale and you're sorted.
OK. Great. How do I replicate that with fluids?
Using traditional valves it's easy enough: A small signal flow can move a sprung valve body to one side, allowing a thru-hole to align with a much larger, higher pressure flow that then roars into being. Instant flow amplification! A transistor.
But what if we want to follow the Octobot's example and run fluidic logic without any moving parts at all? There is a way, and to reveal it we shall look at the DC-10 airliner.
A long time before Octobot there was the DC-10, the archaic three-engined poster boy from the 1970s. This was notable not just for having three engines, but also for being the first commercial aircraft to use fluidic logic, which it used to drive the thrust reverser.
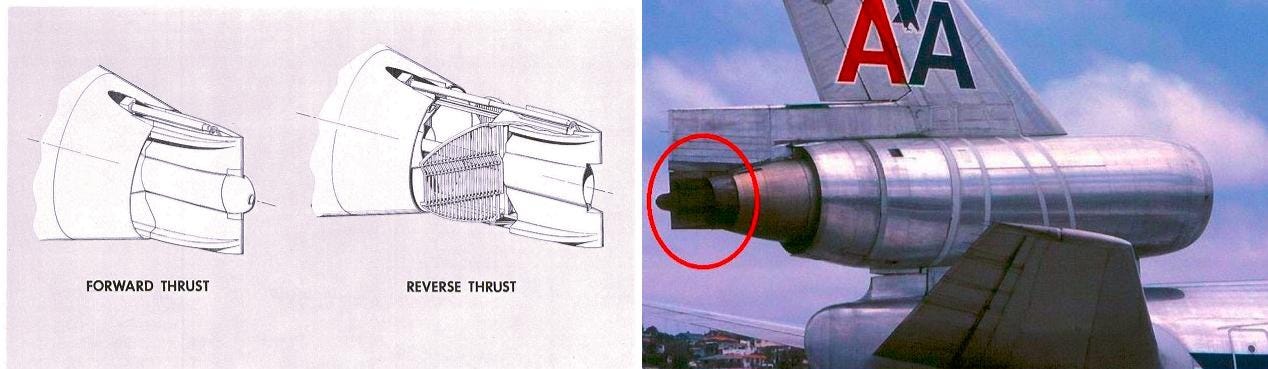
Basically a relatively small compressed air input (the control) would deflect a much higher volume flow into one or more actuation channels.
This can be done in multiple ways: See the example of the bistable Coanda effect amplifier shown below. In this, without a control signal the fluid just blasts straight into a baffle, deflecting it into the vents. Add a control signal in either direction and the main flow is directed into one of two outputs, to actuate whatever equipment you desire.
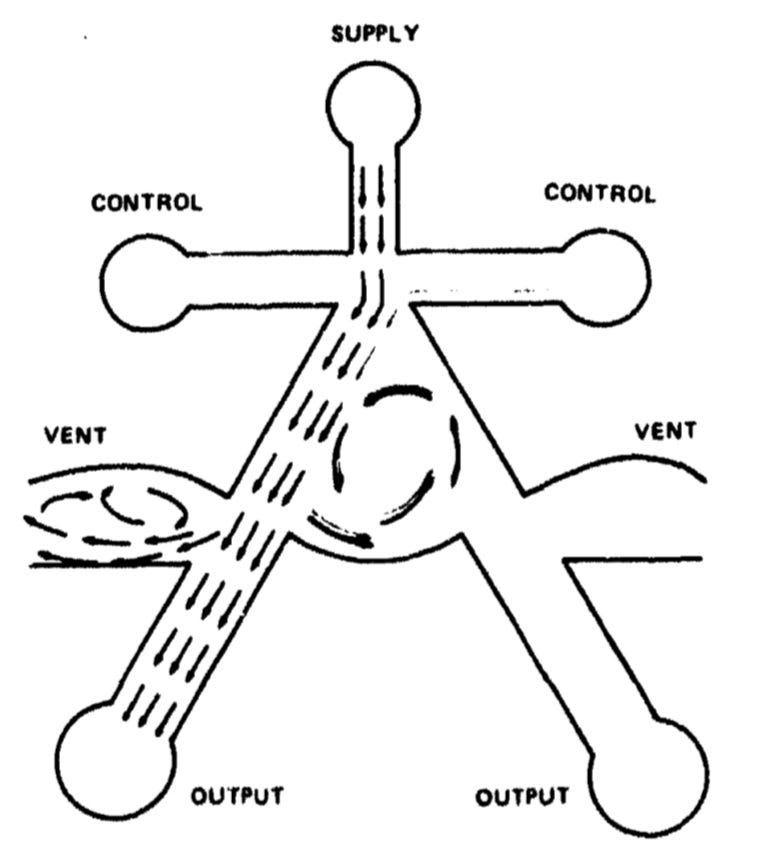
What's interesting about this example is it's bistable: A single control signal persistently deflects the output even once the control is turned off, as the jet hugs the wall through the Coanda effect and sets up recirculating vortices over the baffle that keep it there. Another control jet is required to deflect it once set, or both at once to reset the stream.
And just like that we've created a transistor and primitive memory storage with nothing more than flow and clever geometry.
That's fine for actuating a thrust reverser or industrial machinery, but there's a whole bundle of logical functions in a computer, so transistors alone are insufficient. Can we perform other logical functions?
Can fluids think?
2: Soft, sensitive robots.
We all know about robots these days, but what comes to your mind when thinking about them? If like me you’re of a manufacturing persuasion, hiding crustacean-like in the nooks and crannies of the industrial reef, then a ‘robot’ means an industrial arm, moving, grasping and placing with scary speed and impossible precision. To the more excitable sort of technophile a ‘robot’ might mean a sleek bipedal tech-demonstrator doing backflips or serving cocktails for photo-ops. Or for those of a more Black-Mirror tendency it might be the iconic figure of Boston Dynamic’s quadrupedal robot ‘dog’, an eyeless yellow oddball that has an uncomfortable hint of Bloodhound about it: It’s all too easy to imagine it chasing you through woodland, stabbing a red targeting laser through writhing ferns.
What you’re unlikely to picture when thinking of a ‘robot’ is something… soft. But why not?
Soft robotics is a new field, borne of the realization that robots, while very useful on their own, could be even more useful if they were collaborative. -And collaboration with humans means not breaking their bones, jabbing them with implements or getting confused by our waffly lack of precision.
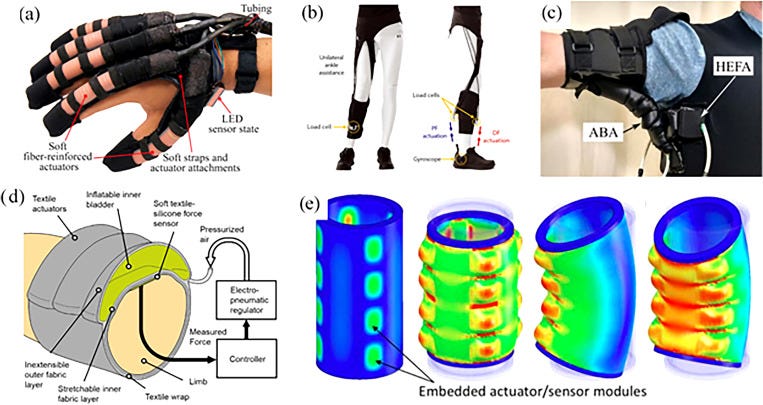
A soft robot is one where sinews of cable and muscles of motors are swapped-out and replaced by something squishier and friendlier for us to work with. It might be a collaborative tool, a rehabilitative aid or a questing searcher through the rubble. It’s designed to yield slightly to the chaos of the world, like your hand as it grips or a root working around objects.
And when one of these objects is a human hand, with its fragile, snappable bones, a soft robot could become a wearable rehabilitative tool for stroke victims. It could be a force amplifier, increasing their grip strength without forcing them into motions outside the normal range of their joints: A soft exoskeleton hydraulically or pneumatically powered through squishy actuator ‘muscles’, helping those injured by trauma come to terms with their body again.
Sounds nice. Where does fluid logic fit in?
Both micro-fluidics and soft robotics are fields mostly working in isolation. This is a shame, because they are natural bedfellows.
A micro-fluidic amplifier, if sufficiently miniaturised in a pliable substrate, is effectively a flow sensor, and if its input is the pressure induced by a stroke victim grasping their hands, and the output is an amplification of this force, then a clever prosthesis controlled by micro-fluidics could wrap around a person’s limbs or fingers and amplify their efforts. Useful for someone recovering from serious physical trauma.
The pressure would have to come from somewhere of course, and you could always use a motor, but a clever person might see something more elegant: Perhaps an inflated bladder, pressurised by the casual movements of a person’s hips or core in any of the hundreds of unconscious movements we make every minute? It could harvest this unconscious corrective load and transmit it to the hand, arms or legs, to charge the fluidic sensors, amplifiers and logic gates that an injured person needs to move again.
Help, from a friendly soft robot.
And the funny thing about this would be that the logic, the ‘brains’ of the operation would be distributed: Sensors and logic circuits in the fingers, arms and joints, near to the action. The user would become a hybrid, like the alien octopus with eight little brains in its arms. Part human, part hydraulic, a creature of pressure that thinks with fluid.
Or why not use soft robotics to make a ‘tapeworm’ for pipe inspection? A ring-shaped hollow softie that undulates its way through the dark places, checking out the flow, feeling the texture of the walls and listening to the sounds of the underground. You could control its undulations with fluidic logic, powered by an electric pump… or if you're clever, even the flow itself.
Give the worm a ring mouth and it could sample liquid or gas and create pressure differences that could power it using a ram-effect or ringed venturi sections, tapping the flow just enough for propulsion. Do this with a clever soft robot, that twists and gropes its way around obstructions, and you'll have created an organic-looking inspection worm with infinite range: Feeling the pressure and thinking with flow…
The Chernobyl Wyrm.
Or perhaps I’m being too poetic. I mean, how do these flow logic gates work anyway?
Let’s get into the fine technical stuff, shall we!
3: Gates to success.
We've established that you can supplement an electrical binary signal (on/ off) for a fluidic one (flow/ no flow), then use those signals to amplify, divert or shut-off other flows. Grand, but where's the logic?